| |
| |||||||
 |
| | LinkBack | Thread Tools | Display Modes |
 08-27-2009, 02:59 PM
08-27-2009, 02:59 PM
| #1 |
| Rock Crawler Join Date: Mar 2009 Location: Cottontown
Posts: 880
|
Got a stupidly good deal on a brand new ITB mamba micro pro at my LHS. Put it in last night and this morning. Looks bitchin, comes with the 4200kv brushless motor.I fired it up for some test runs and some programmig with castle link, and... It runs fine. As long as it isnt trying to climb anything, or there is any resistance against it making foward progress. As soon as I put it against a wall, and apply the throttle it stutters, hesitates and finally goes on up it. I have tried adjusting the throttle curve as well as the start power and acceleration limiter all to no avail. Im stuck, any help. |

|  |
| Sponsored Links | |
| | |
|
08-27-2009, 03:28 PM
| #2 |
| I wanna be Dave Join Date: Sep 2005 Location: Houston, TX
Posts: 16,952
|
You have this in your MRC? That motor doesnt have the torque that you need...
|
|
| |
|
08-27-2009, 03:30 PM
| #3 |
| MODERATOR   Join Date: Jul 2004 Location: Ohio
Posts: 18,928
|
Didn't we already establish sensorless inrunners and crawlers don't mix?
|
|
| |
|
08-27-2009, 03:33 PM
| #4 |
| Rock Crawler Join Date: Mar 2009 Location: Cottontown
Posts: 880
|
Actually, I have been shocked. It seems to have alot of torque. Comparing it to both the stock motor, and mini slider motor I just pulled out, this thing eats em both alive on torque. And its almost as fast as the slider It seems like whenever its crawling up something it the ESC is constantly loosing power and then gaining it back... I can hear the motor transition from having power to not having any...? I dont get it |
|
| |
|
08-27-2009, 03:37 PM
| #5 |
| MODERATOR Join Date: Jul 2004 Location: Ohio
Posts: 18,928
|
It's cogging.
|
|
| |
|
08-27-2009, 03:40 PM
| #6 |
| Pebble Pounder Join Date: Dec 2008 Location: Tomball, Tx
Posts: 168
|
You are experiencing the basic problem with higher kv unsensored motors in a crawler application. At startup, the ESC doesn't know where the rotor is so it will send some pulses to the coils as a 'kick start' to get the rotor turning. The rotor must reach a minimum rpm before the ESC can 'read' the feedback from the individual coils and then adjust its output accordingly. The need for this 'kick start' is the cause of the jerkyness (yes, i just made that one up) This is my limited understanding of unsensored motor theory, but remember that i ain't no rocket surgeon. HTH |
|
| |
|
08-27-2009, 03:42 PM
| #7 | |
| MODERATOR Join Date: Jul 2004 Location: Ohio
Posts: 18,928
| Quote:
| |
|
| |
|
08-27-2009, 03:44 PM
| #8 |
| Pebble Pounder Join Date: Dec 2008 Location: Tomball, Tx
Posts: 168
|
jerkYness |
|
| |
|
08-27-2009, 03:46 PM
| #9 |
| Rock Crawler Join Date: Mar 2009 Location: Cottontown
Posts: 880
|
It does not cogg when driving on a flat surface at any throttle input. I would assume that if it were going to do the aforementioned cogging that it would do it under all low throttle applications. |
|
| |
|
08-27-2009, 03:49 PM
| #10 |
| MODERATOR Join Date: Jul 2004 Location: Ohio
Posts: 18,928
|
Difference is in the load. I'll just say that you won't find many, if any people using that motor, or any sensorless inrunners in a crawler. |
|
| |
|
08-27-2009, 03:58 PM
| #11 |
| Pebble Pounder Join Date: Dec 2008 Location: Tomball, Tx
Posts: 168
|
It is a function of the load vs minimum rpm. under no load the 'kick start' is gentle enough bring the rotor up to the minimum RPM to mask the cogging. Under a load like climbing a wall, the normal kick start isn't enough to achieve the minimum RPM. The ESC gives a bigger kick start, but it still isn't enough, so it kicks even harder. This repeats until the minimum RPM is achieved and the esc can truly 'control' the motor. Thus, cogging. I have the same setup as you in my VendettaST and have the same issues as you when i get stupid and try to 'crawl' with it. |
|
| |
|
08-27-2009, 04:15 PM
| #12 |
| Rock Crawler Join Date: Mar 2009 Location: Cottontown
Posts: 880
|
Fixed... From what I can tell its a timing and punch control issue. For anyone that runs this setup, here are my castle link settings...   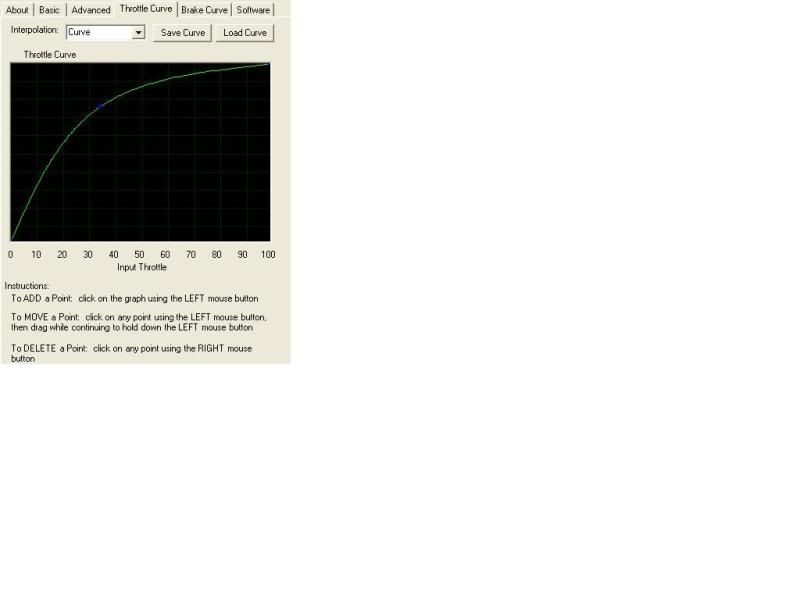 |
|
| |
|
08-27-2009, 05:22 PM
| #13 |
| I wanna be Dave Join Date: Sep 2005 Location: Houston, TX
Posts: 16,952
|
First, your throttle curve is the exact opposite of what you want (or at least what I'd want). If you make it look like an exponential curve, then you'll have more control of the low end. Here's what I am talking about:  Second, if it were me, I'd swap that Brake/Reverse Type to get rid of the double touch reverse.... Last edited by JeremyH; 08-27-2009 at 05:27 PM. |
|
| |
|
08-27-2009, 06:28 PM
| #14 |
| Rock Crawler Join Date: Mar 2009 Location: Cottontown
Posts: 880
|
I tried the throttle curve like you said, and it just keeps the cogging bit. I will give a look see to the brake thing. Thanks for your help. I should note that I have not eliminated all cogging, it still does it, but only when in a real tight bind, and even then it is barely noticable. |
|
| |
|
08-27-2009, 06:57 PM
| #15 | |
| I wanna be Dave Join Date: Sep 2005 Location: Houston, TX
Posts: 16,952
| Quote:
| |
|
| |
|
08-27-2009, 07:02 PM
| #16 |
| Rock Crawler Join Date: Mar 2009 Location: Cottontown
Posts: 880
|
With the curve I have posted, it barely cogs at all. Its only noticable in a really tight bind. |
|
| |
|
08-27-2009, 07:04 PM
| #17 |
| I wanna be Dave Join Date: Sep 2005 Location: Houston, TX
Posts: 16,952
|
Ahh....ok. Well, the best advice is to switch to a brushed motor. I tried a brushless on a crawler (low kv~800) and I didnt like the lack of internal drag due to the lack of brushes. I think you'd really be much happier with a brushed motor... |
|
| |
|
08-27-2009, 07:08 PM
| #18 |
| RCC Addict Join Date: Sep 2007 Location: WHEAT RIDGE, CO
Posts: 1,102
|
What sofware package ya running? Newest one I've got is the 3.16. If don't have it try to download. Seems everytime they get newer ware works better. Just a thought!! Good luck  |
|
| |
|
08-27-2009, 07:14 PM
| #19 |
| Rock Crawler Join Date: Mar 2009 Location: Cottontown
Posts: 880
|
Yeah, I fogot to add that when i updated the software AND firmware it stopped alot of it
|
|
| |
|
08-27-2009, 07:18 PM
| #20 |
| RCC Addict Join Date: Sep 2007 Location: WHEAT RIDGE, CO
Posts: 1,102
|
Sound: Just noticed the "custom timing". Does it work beter there? Courious!!
|
|
| |
|
| |



 Linear Mode
Linear Mode








