PipeDreams
RCC Addict
Ok no worries I'll be patient and wait. Like a wise man once said... good things come to those who wait lol.


You wave wound it, which doesn't work right in a two magnet two brush motor.
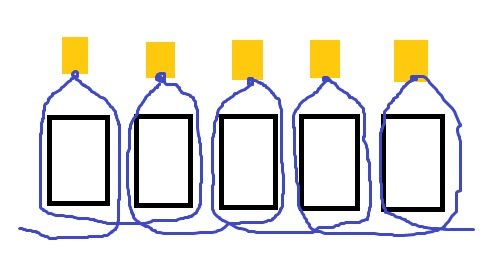
Wind it like it used to be, but terminate it differently. Hopefully my paint program skills are good enough to show you the jist.
Start with 20t 26awg wire.
If you terminate it like I have shown, the zero timing will be between the small windows in the can.
John,
Should I use a transmission with gear reduction to achieve mild, scale speeds, or should I keep it 1:1?
Thanks again